





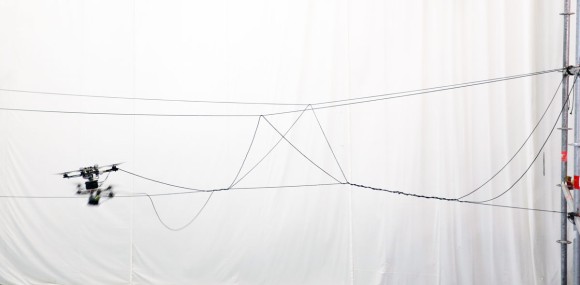
スイスのチューリッヒ工科大学飛行マシンアリーナに設置された二つの足場の間に架けられた橋は、世界初の空飛ぶマシンが自動で作り上げたフルスケールかつ荷重に耐えることのできる橋だ。
その巧みな技は、クアッドコプター(飛行ロボット)を使った建設分野における新しい進歩を象徴するものだ。
■
両端に設置された金属の足場を除けば、橋は「ダイニーマ」という超高分子量ポリエチレンのロープでできている。
これは1mあたり7gと軽量でありながらも、直径4mmで1,300kgまで保持できる、空中建築には理想的な低強度重量比を誇る素材だ。
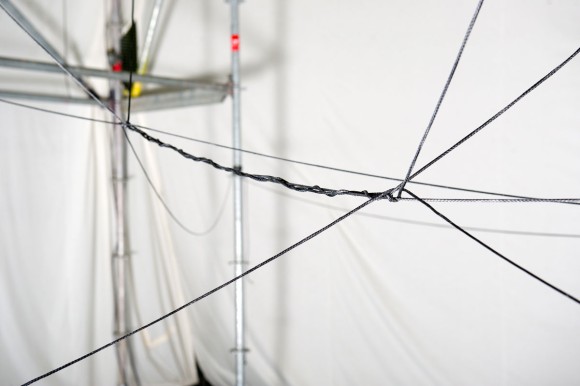
全長7.4mの橋には、ノット、リンク、ブレイズといった様々な結び技法が用いられており、ロープの総延長は120mほどだ。

実験が行われた飛行マシンアリーナにはモーションキャプチャーシステムが備わっており、これで小型クアッドコプターの位置と高度が計測される。
クアッドコプターとは別の場所に設置されたコンピューターではアルゴリズムが稼働し、電波で命令を送信している。

■
建設を開始する前、まず足場の位置が計測され、システムに入力される。ロープを留める固定位置を決定すれば、あとは電動式リールを装備したクアッドコプターが張力を調整しながら、橋の基礎部分と支柱部分を自動的に編み込んでいく。
ロープはプラスチック製のガイドチューブを通って、2基のプロペラの間にあるリリースポイントから伸びている。
作業中、ロープによってクアッドコプターに掛かる外力とトルクをシステムが推測しており、これを考慮しつつクアッドコプターの動作を適切に保つ。
完成後、研究者自らが橋の上を渡って、耐加重性能を実演した。
橋の建設完了後、人が渡り易いようにスタビライダーが取り付けられている。
ロープの構造を検出するセンサーがないため、橋の狭い開口部の位置を計測し、システムに入力する必要がある。
これがクアッドコプターの軌道に適用され、スタビライザーが編み込まれる。
また同チームは、飛行ロボットで建設可能な構造の種類を特定し、設計するための一連のコンピューターツールも開発した。
これらのツールを用いて、設計をシミュレートし、実行可能な手順や構造を建設に先立って評価することができる。
■
































